
Смертельная авария Tesla с Model S — так себе повод, но, как в анекдоте о драке на свадьбе, «надо же кому-то начинать». Обсуждений много, трактовок происходящего на рынке и причин аварий миллион.
«Да как же он фуру-то не увидел!» и вот этого всего. Не увидел, не справился с ситуацией, да. И автопилот еще долго не сможет справиться с тем, что щелкают белковые выпускники автошкол.
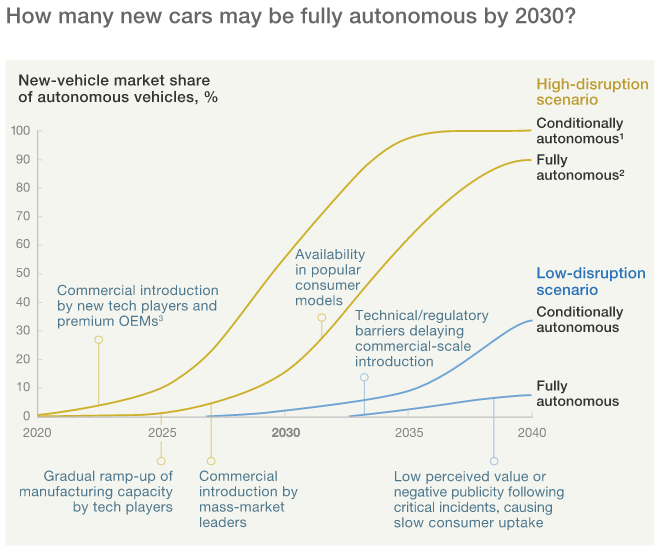
Попробую описать 3 практических сложности, с которыми сталкиваются автопилоты сейчас и которые не выглядят решаемыми в ближайшие годы. Так что когда McKinsey говорит, что к 2030 году в лучшем случае 15% новых автомобилей будут самоуправляемыми, верьте им.
И если что-то пойдет не так, то к 2040 году не более 5% автомобилей можно будет назвать автопилотируемыми.
Почему?
Первая проблема, датчики
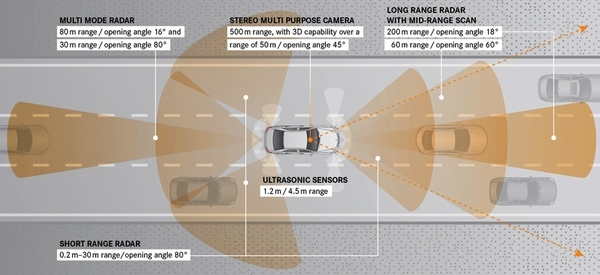
Главный тормоз развития автопилотов — не алгоритмы. А отвратительное понимание машиной окружающего пространства. Информации с современных датчиков категорически недостаточно и совершенствование механизма принятия решений (нейросети и так далее) мало что меняет. Сканирующие лидары (черные ведерки, что стоят на большинстве прототипов, включая Google Car) запредельно дороги для серийных автомобилей и не дают необходимой для уверенного движения полноты информации.
Простая иллюстрация: AI побеждает пилота на симуляторе воздушного боя в той ситуации, когда у машины есть полная информация о происходящем. Компьютер проедет вас в любом симуляторе. На дороге этого не произойдет.
И компьютерные полигоны для автономного транспорта , которые обучаются на синтетической информации, ничего серьезно не изменят.
Что делать?
Есть мнение, что при существующих датчиках (камеры, радары, лидары и т.п.) полностью решить проблему самоуправления вообще нельзя. Так что совершенствовать возможности современных датчиков, придумывать новые для корректной «оцифровки» пространства в динамике.
Чем-то похоже на вопрос с аккумуляторами. Пока емкость аккумуляторов не получится повысить в разы, а лучше на порядок, носимая электроника, электрокары и многие другие топчутся на месте.
Вторая проблема, неуниверсальность

Все знакомы с Законом Парето, так вот в автопилотах он тоже выполняется. 80% дорожных ситуаций машины понимают, оставшиеся 20% все портят.
Это не значит, что автопилоты могут ехать по 80% дорог в мире. Это означает, что в рамках любой произвольно взятой поездки 80% ситуаций не вызовут проблем, 20% — вызовут. Опасная пропорция.
Посмотрите на то, что работает. Эти задачи и окажутся самыми простыми. Автобанный автопилот, автопарковка, заезд в гараж — не без помарок, но функционирует.
Разработчикам осталось самое неприятное: проезд пересечений, перестроения в оживленном потоке и еще пара десятков похожих сценариев. С некоторыми кейсами не очень понятно, что вообще делать. Например, автомобилю сложно заранее понять, проедет ли он между двумя близко расположенными препятствиями. И пока невозможно понять свой динамический коридор (то есть границы пространства, которые автомобиль занимает в динамике), а без этого невозможно корректно просчитать дорожную ситуацию.
Существующие автопилоты настолько не универсальны, что требуют каждый дорожный сценарий описывать отдельно. Читали комментарий Mobileye к пресловутой аварии? Официальная позиция такова: система предотвращений столкновений не понимает приезда автомобиля со встречной полосы, году в 2018 начнет.
Что делать?
Клиенту, как минимум, не вестись на эффектные демонстрации на автострадах — это самые простые задачи. Что до игроков, то они пока не понимают, какой путь верен. Отсюда нейросети, ручная разметка сценариев (пишут, что в Mobileye этим занимаются 600 человек, а скоро будет более 1000), виртуальные полигоны и все такое.
Проблема третья, рыночная

Автопилоту или другой фиче мало быть функциональной, нужно стать дешевой. Автомобильной навигации больше двадцати лет. Но при цене системы в пару-тройку тысяч долларов она до сих пор ставится менее чем на 20% всех новых автомобилей. Самоуправляемый функционал еще дороже.
70 тысяч баксов за лидар Velodyne или 30 тысяч за несколько лидаров Sick — перебор, это понятно. Если ориентироваться на серийные автомобили, advanced driver assistance systems, сокращенно ADAS, (которые еще не автопилоты) добавляют к цене 7-12 тысяч долларов. Нормально? Не-а.
Исследование Boston Consulting Group говорит, что потратить на автопилот более 5 тысяч долларов готовы только 17% покупателей (американских покупателей, замечу). То есть чтобы завоевать хотя бы 15 процентов рынка, системе автопилотирования нужно стать грубо говоря на порядок умнее и вдвое дешевле, чем сейчас. Это не выглядит близкой перспективой.
Так что помощников с элементами автопилотирования (автопарковка, автодвижение в пробке, движение по трассе с разметкой или даже конвойные режимы) в ближайшие пару-тройку лет будет все больше. Автопроизводители удешевят и масштабируют эти функции, не проблема. Toyota предлагает свой простейший Safety Sense всего за 500-1000 долларов, это немного.
А в сложных ситуациях (те самые 20 процентов поездки) управление на долгие годы останется на человеке. Почему? См. пункт 1 — машина не может адекватно оценить происходящее и в ближайшее время не научится.
Так что делать?
Привыкать к аббревиатуре ADAS, которая в ближайшие пять лет станет такой же привычной как стали ABS и ESP. После 2020 года стоит ждать активного госрегулирования в этой области, системы активной помощи станут обязательными в Европе и США.
И понимать, что полноценного автопилота пока на рынке нет, и вообще у них (пока) неустранимые проблемы.
Дальше подробнее расскажу о первой проблеме — датчиках.
Источник: https://geektimes.ru/post/278354/
no subject
Date: 2016-07-14 09:22 pm (UTC)А из комментов на гике:
"Например «вот этот автомобиль вроде бы пытается перестроиться, а вот тот виляет, словно там права только вчера получили, надо бы его объехать подальше».
Далеко впереди вроде пробка, пора тормозить.
На двойной осевой стоит напуганная собака и непонятно или она сейчас со всех сил рванет на мою сторону или на противоположную.
Пассивные датчики вот это все смогут обработать только при достижении интеллекта примерно равного человеческому.
Но можно пойти другим путем — оборудовать дорогу, чтобы все разметки, дорожные знаки и переходы были известны заранее, сигнал светофора воспринимался не на камеру, а по сети, заранее, ограждение дороги, чтобы не было желающих пересекать ее где угодно.
Оборудовать все автомобили, чтобы они сообщали друг другу положение и намерение, и тогда вообще не нужно будет смотреть где эта фура — о том, что она там есть и собирается поворачивать будет знать и автопилот едущего автомобиля, да и сама фура будет про него знать и не полезет вперед.
Этот вариант — стоит много денег в инфраструктуру, но с точки зрения технической реализации — он уже доступен и гораздо более надежен, и расходы на него даже можно просчитать.
А вот создание ИИ достаточного уровня для полного автопилота — ни по времени, ни по средствам, ни по реализации, достаточной для установки в автомобиль — сейчас оценить даже примерно не выходит."
no subject
Date: 2016-07-15 09:21 am (UTC)Я понял, что автор считает, что это не вопрос ближайшего времени. Но его аргументация не позволяет судить о сроках. Проблем нет. Писать стихи, картины, изобретать вот где нужен интеллект на уровне человека. А дать автопилоту всю необходимую информацию и прописать алгоритмы поведения на дороге не представляет сложности. Вот, возьмем, для примера случай с собакой. В принципе установка, например, инфракрасного датчика поможет различат живые объекты. В результате можно запрограммировать снижение скорости при приближении к таким объектам исходя из рисков, возникающих из-за возможного внезапного изменения поведения. Любая проблема здесь решаема. Вопрос на самом деле даже только в деньгах. Время будет определятся количеством сил, брошенных на продвижение этой технологии.